
























1、地面測量型三維激光掃描儀進行廠區(qū)、車間數(shù)據(jù)掃描
根據(jù)現(xiàn)場、設備形狀和環(huán)境以及三維激光掃描儀的有效測程合理的布設掃描儀的架站點,然后在每個站點根據(jù)后續(xù)成圖需求設置合適的分辨率進行掃描。在掃描過程中,可以通過架設標靶以提高后續(xù)點云拼接的精度。地面掃描我們采用的是FARO330和Trimble TX5。將全部站點的掃描數(shù)據(jù)導入到 Trimble Realworks軟件中,執(zhí)行自動拼接命令。 Trimble Realworks軟件自動拼接命令完全不需要人為干預,可以簡單、快捷的得到高精度的整體點云數(shù)據(jù)。
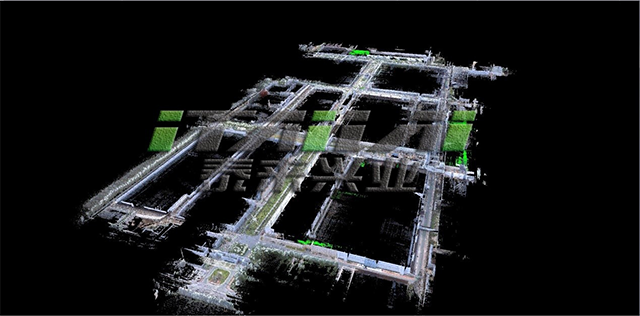
以下是車間和廠區(qū)的彩色點云:




2、車載移動三維激光掃描儀設備獲取廠區(qū)整個室外三維點云數(shù)據(jù)
車載三維激光掃描儀是將三維激光掃描設備、衛(wèi)星定位模塊、慣性測量裝置、里程計、360°全景相機、總成控制模塊和高性能板卡計算機集成并封裝于汽車的剛性平臺之上,在汽車移動過程中,快速獲取高精度定位定姿數(shù)據(jù)、高密度三維點云和高清連續(xù)全景影像數(shù)據(jù),通過統(tǒng)一的地理參考和攝影測量解析處理,實現(xiàn)無控制的空間地理信息采集與建庫。我們采用的車載是Topcon IP-S2移動測量系統(tǒng):


3、無人機空中航測照片獲取廠區(qū)空中三維模型點云數(shù)據(jù)
無人機是利用無線電遙控設備和自備的程序控制裝置的不載人飛機,可以實時、動態(tài)、大量采集空間點云信息,可快速獲取高密度、高精度的點云數(shù)據(jù)。無人機航測我們采用的是Motoar Sky MS-970,機身采用碳纖復合材料及鈦合金連接件,翼臂可折疊,自輕量化,可搭配2D/3D云臺,高負載掛接微單、專業(yè)單反、紅外、激光雷達等多種傳感器,地面站全程監(jiān)控,一鍵起飛、懸停、返航遙控器、平板、三防筆記本多種控制方式。



4、利用高精度測量設備獲取的數(shù)據(jù)創(chuàng)建高精度三維實景模型
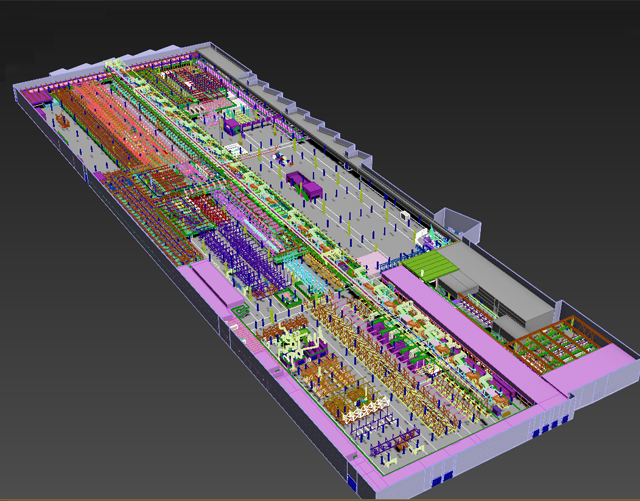
拼接、去噪處理后的點云在Trimble Realworks 和3Dmax軟件中,根據(jù)點云進行廠區(qū)和車間的模型建立和貼圖,以達到其真實性。以下是車間和廠區(qū)的部分模型:

聲明:本網(wǎng)站部分的文章、圖片及材料來源于互聯(lián)網(wǎng),如有侵權(quán)請聯(lián)系撤刪,謝謝!
 掃一掃關(guān)注官方微信
掃一掃關(guān)注官方微信